Paxster’s website begins with a boast: The best-selling Norwegian vehicle of all time! Production figures show this to be about 3 000 vehicles produced.
Paxster is a last mile delivery vehicle, from a transportation hub to a final household destination. In Norway, last mile implies that the vehicle can withstand rough road and weather conditions. Think ice and snow, respectively.
Paxster began as a side-project within Loyds, a supplier of vehicle equipment (but not vehicles) for Norway Post = Posten Norge = the Norwegian post office. It had its facilities in Sarpsborg, a municipality in south-east Norway that has grown into Fredrikstad. When the post office announced some ambitious environmental goals, Loyds started to map how post office vehicles worked. Together they found several challenges about the solutions offered. Some were inefficient, some unprofitable, some both and some neither. They ultimately (in 2013) got approval to work on defining the best ergonomic solutions, together with post-office drivers.
After a few months, the first prototype was ready to test, and adapt, to become a future delivery vehicle for mail, parcels and newspapers.
Bård Eker (1961 – ) through his wholly owned company, Eker Design, designed the vehicle and led to it winning awards for good design. In the autumn of 2013 Paxster was put into production for the Norwegian market.
On July 1st 2015 Paxster was transferred to a separate Aktieselskap (AS) = limited liability company. Since then, Paxsters have been sold in several countries around the world. Paxster claims to be constantly working to develop vehicles to be the best in class when it comes to efficiency, ergonomics and safety.
New Zealand
In 2016, Paxster expanded to New Zealand. New Zealand Post begun rolling out 54 Paxster electric-delivery vehicles in the North Shore district of Auckland as well as the southern town of Oamaru. New Zealand Post has been given permission to use the vehicles on the sidewalks/ footpaths (preferred term in New Zealand) in residential neighborhoods. It was noted that New Zealand Post drivers received safety training, and they are required to give way to all other footpath users.
The initial fleet of New Zealand Paxsters, in 2016.
The fleet grew to 423 in 2018. Initially there were complaints to NZ Post about Paxsters, peaking at 31 in 2018-07. Paxsters were: damaging the grass berm = a narrow ledge or shelf of grass along the top or bottom of a slope, reversing into other vehicles, driving at alleged excessive speed on the footpath.
There were 249 crashes in total with the majority involving a Paxster hitting or being hit by a vehicle or object in 2018, up from 82 in 2017. The number of injuries to posties more than doubled from 36 in 2017 to 80 in 2018. Two of these injuries in 2018 were serious and required professional medical treatment, but the severity of the injuries was less than those in bicycles. A spokesperson stated there were declining costs associated with injuries since the introduction of Paxsters. Compared to bicycles, there were less severe injuries, attributed to the stability of a four wheel vehicle, more efficient braking, greater visibility and more robust protection.
The New Zealand postal union also commented that when the post office introduced the new vehicles they immediately introduced a new roster. Posties on bikes used to work about six hours a day. New rotating shifts for the Paxsters demanded nine-hour days. This increased driver fatigue. New modes of driving on the footpath, and a need to make very quick decisions, contributed to an increase in injuries. Many posties enjoy driving Paxsters but dozens quit when the e-vehicles were introduced. Most of these were long-serving, who preferred to ride a bicycle and felt safer on one. While posties were concerned about the number of injuries, but were more worried about the damage they could do if children sprung out of driveways unexpectedly.
Meanwhile in other parts of Europe…
Later, test vehicles were supplied to the Royal Mail in the United Kingdom, as well as Swedish and German last mile delivery companies. Use of test vehicles have shown that injuries are less severe than when using a bicycle.
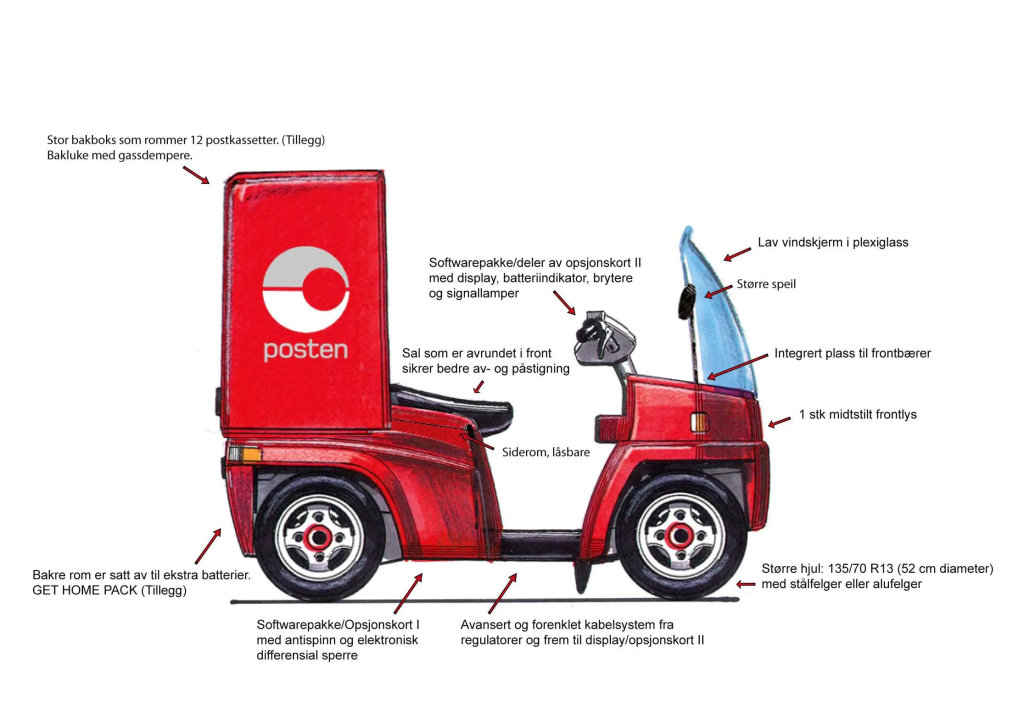
… and now the difficult part, translating the description into English. From left to right starting at the top. 1) A large storage box that will take 12 post cassettes (Optional). The rear hatch has gas dampers. 2) Software package/ part of option card II with display, battery indicator, switches and signal lamps. 3) Low windscreen in plexiglass. 4) Large mirror. Seat that is rounded at the front, allows better on and off movements. Integrated space for a front carrier. 1 front light in the middle. Lockable side storage compartment. The space at the bask is for an extra battery (get home package) at an additional price. Large wheels 135(70 R 13 = 52 cm diameter, on steel or aluminum wheels. Sotware package/ Option card 1 with anti-spin and an electronic differential lock. Anvanced and improved cable system from the regulator to the display/ option card 2.No, not all Paxster vehicles are red. Many companies choose white. Here is a vehicle for DHL in yellow, admittedly with a red logo. A mural of a freight cycle is painted on the wall behind.
History of Automobile Production in Norway
In terms of ICE vehicles: Norsk produced 10 vehicles between 1908 and 1911: a lighter car with a single-cylinder 8 hp engine and a heavier touring car with 4-cylinder engine. Bjering in Gjøvik produced six ICE vehicles between 1920 and 1925. Geijer was even more productive brand and produced about 25 vehicles between 1923 and 1930. Troll made five 2+2 sports cars with a fibreglass body from 1956 to 1958.
In terms of Electric vehicles: About 2 500 Th¡nk cars were produced from 1991 to 2011. There were about 1 500 Kewet (later renamed Buddy) vehicles produced in Økern, Norway, Hadsund, Denmark and Nordhausen, Germany between 2005 and 2013. It is difficult to find out how many were produced where. Of those, 1 087 were registered in Norway.
Some one-off prototypes have also been produced. The one with the most publicity was made by Aetek, a Norwegian company, with the backing of Statoil, now Equinor, the Norwegian government oil company. The FYK, was a Norwegian sports car prototype launched in 2006. It runs on a mixture of hydrogen and natural gas. It was designed as a technology demonstrator, without any plans to put it into series production.
Note: Work began on this post 2021/08/21 at 12:00.
Rendering speculating on the appearance of a European version of the Hyundai Casper, to be available at the end of 2024, at a price under €20 000.
Sometimes, interesting statistics just pass through my reading conduit, mentally noted, but not recorded. For example, at some point it was claimed that the median age of the owners of new Suzuki vehicles was the highest in Norway. I believe it was somewhere in the early 60s. Because this was at the brand level I was not surprised. I realized that all of the Suzuki owners I knew were mature. However, if the result was based on a specific Suzuki model, I would have been more surprised.
Reading does not give me all the answers. There are situations where I learn things on the streets. A new example, all those observations where one guesses the apparent demographic makeup of vehicle drivers. Many vehicle models are driven by a mix of genders and ages. There are exceptions. Drivers of a BMW i3 are predominantly female. The owners I know are all women teachers, except for one outlier in California. In terms of age, drivers of Hyundai Atos have always looked old! So do drivers of its replacement, the Hyundai i10. These are the two models I expected to have the oldest owners. These are not cars that the youngest drivers eagerly await to inherit from generous grandparents.
As Norway heads deeper into its final year allowing sale of new internal combustion engine ( ICE) vehicles, I have been wondering what older people without the cash to buy a Tesla Y will be acquiring. It is a relevant question, to be asked everywhere. Electric vehicles (EVs) are still less affordable than ICE vehicles.
I had expected Hyundai to update its i10 to an EV. This appears to be an incorrect assessment. European media speculates that Hyundai’s smallest EV will be the Casper. If you think this vehicle is named after a friendly ghost, you are only partially correct. According to Hyundai, it was named after a skateboarding technique, that was named after this ghost.
The Hyundai Casper is an A-segment (Europe)/ city car (North America) vehicle. Hyundai claims it is the world’s smallest crossover SUV. The precise size of the EV version is unknown (to me, anyway) at this point but it will probably not be more than: 3.60 (length) x 1.60 (width) x 1.60 (height) meters. The model is currently under development in Japan. Interesting, because Hyundai is a South Korean brand, and the primary market is Europe.
It is to be equipped with an American Borg-Warner iDM 146 = integrated (electric) drive module, that operates with 400 V, and provides a peak output of 70 to 100 kW. Torque is stated to be from 1500 – 2000 Nm. Press releases about the motor state: “its modular design allows power and torque output to be scaled specifically to customer requirements.” Several automotive journalists claim a 0 – 100 km/h acceleration at 6.5 s. It is not quite as fast as that of a B-segment Volvo EX30, but fast enough for most people. It will also be equipped with a 39 kWh battery, giving an estimated range of about 300 km, but this is disputed. Fast charging from 10 – 80% takes about 40 minutes.
Note: I find much of the content about the Casper specifications from automotive journalists (and others) difficult to accept. Some have specified a power of 135 kW, which is outside the Borg-Warner range for this model of motor. If this were 135 horse power, then this is at the top end of the range, 100 kW. Then there are questions about torque. Torque values of 1500 Nm have been offered by journalists. Values from there to 2000 Nm are given in written material from Borg-Warner. Thus, I wonder if Americans, used to measuring torque in foot-pounds, and not understanding acceptable values in Nm, have made a decimal placement error, so that the torque is between 150 and 200 Nm. A VW electric motor common on ID series vehicles, with 150 kW, typically produces 310 Nm of torque. A standard 2024Tesla Y with 220 kW of power, has 420 Nm of torque. An A-segment Fiat 500e has 86 kW of power and 220 Nm of torque.
European models will be made at the Nošovice, Czech Republic, factory. As long as a few other conditions are met, this allows the model to be treated as a European vehicle, in terms of government subsidies.
According to a video on The Auto Vision – The Korean Car News (YouTube) Channel, there is some possibility that the Casper could also be offered for sale in North America. Hyundai is planning to open an EV plant near Savannah, Georgia. With the right mixture of ingredients this could also allow North American subsidies.
Part of the appeal of the Casper, and similar vehicles, by older drivers, is the height of the vehicle, which gives a better view of the road, which can (to some extent) compensate for reduced reaction speeds. In other European countries, narrow vehicles are appreciated, because they suit narrow medieval streets. In Norway it is narrow rural roads. Everywhere, this type of vehicle is only filled with one or two people, if it is used for commuting. It is not suitable everywhere, but is useful in areas without adequate public transport, but with adequate parking. Frequently, this type of vehicle will appeal to older drivers, especially when provided with advanced driver-assistance systems. Many retired people do not need or want a large car.
Kia Ray
There is also speculation that Hyundai could make a multi-purpose vehicle (MPV) version of the Casper. Yes, it would be sensible for Hyundai to produce something that looks like a Kia Ray. The Ray is 10 cm taller than the Casper. Otherwise most specifications are almost the same.
Hobbies can influence vehicle purchases. I am not convinced that a couple of sets of golf clubs will fit into a Casper, but they probably will fit into a Ray. So people who need to transport large items, such as teenagers, may prefer an MPV.
Since Hyundai tries to keep both brands alive in Europe, it is possible that such a van could be made at Kia’s manufacturing plant in Europe is located in in Žilina, Slovakia.
Driver assistance system features include: Rear Cross-Traffic Collision-Avoidance Assist and Safe Exit Warning. Convenience features include: a ventilated driver’s seat and air-purification mode. Perhaps the most unique feature is its rear passenger doors. These are sliding on the curb side of the vehicle, but swing-out on the opposite side. Regard the swing-out door as an emergency exit.
Speculation
Since the beginning of 2023, Hyundai has only sold EVs in Norway. Currently these are: the Kona, Ioniq 5, Ioniq 6 and Ioniq 5 N. The Kona is front-wheel drive (FWD), the others have all-wheel drive (AWD) as an option, although I have never experienced anyone buying one without that option. Norwegians also prefer cars with trailer hitches and roof racks. The Norwegian Hyundai website, has a page dedicated to trailer hitches, and the carrying capacity of each model, which is for trailers with brakes, 750 kg for some Konas and 300 kg for others, 1 500 kg for the Ioniq 6, and 1 600 kg for the Ioniq 5. While there are pickups in Norway, they are not a popular choice. Almost everyone has access to a utility trailer!
Currently, the suggestion is that Casper will come with FWD, not AWD. I suspect that its purchasers will be a wider demographic than that of the Atos or i10: Older drivers may want to buy one as their only car; middle aged drivers may choose one as a second car, used for commuting; younger drivers may relish the opportunity to buy an affordable vehicle. In a few years time, even the very youngest drivers may eagerly await the inheritance of a Casper from generous grandparents.
Sometimes a single letter changes the meaning of a word. A quadracycle (with an a in the middle) describes a small, human-powered, four wheel vehicle. In contrast, a quadricycle (with an i in the middle) is a small, motorized four wheel vehicle. This word with an i is the topic of this weblog post. A quadricycle was officially defined by the European Union in 1992, and refined and divided into two official types, in 2006: Light = L6e whose unladen mass < = 425 kg, not including the mass of the batteries in case of electric vehicles, with a maximum design speed < = 45 km/h, and a maximum power < = 6 kW; and, Heavy = L7e whose unladen mass excluding batteries < = 450 kg for passenger vehicles or < = 600 kg for freight vehicles, with a maximum design speed < = 90 km/h, and a maximum power < = 15 kW. Other rules also apply. In other parts of the world, especially North America, the term microcar is used instead of quadricycle.
The driving age limit for these vehicles varies with the jurisdiction. L6e can be driven in France by someone who is 14. In Finland the age limit is 15, but in general in Europe it is 16. For many secondary school students, a L6e quadricycle has replaced the bicycle, moped and/ or bus, for transport to school and leisure activities. For L7e vehicles, the general minimum age to drive is 18.
Yet, quadricycles can be dangerous. Locally, two girls (15 and 16 years old) were killed in Steinkjer 2023-07-13 when their L6e vehicle collided with a conventional passenger car at a hilltop with limited vision, on county road 6982.
Driving behind a quadricycle can be a frustrating experience. They are difficult to pass at the best of times on Norwegian roads. There are few places where they can pull in to allow other vehicles to pass, and some drivers of them have no intention of making it easier for others to pass them.
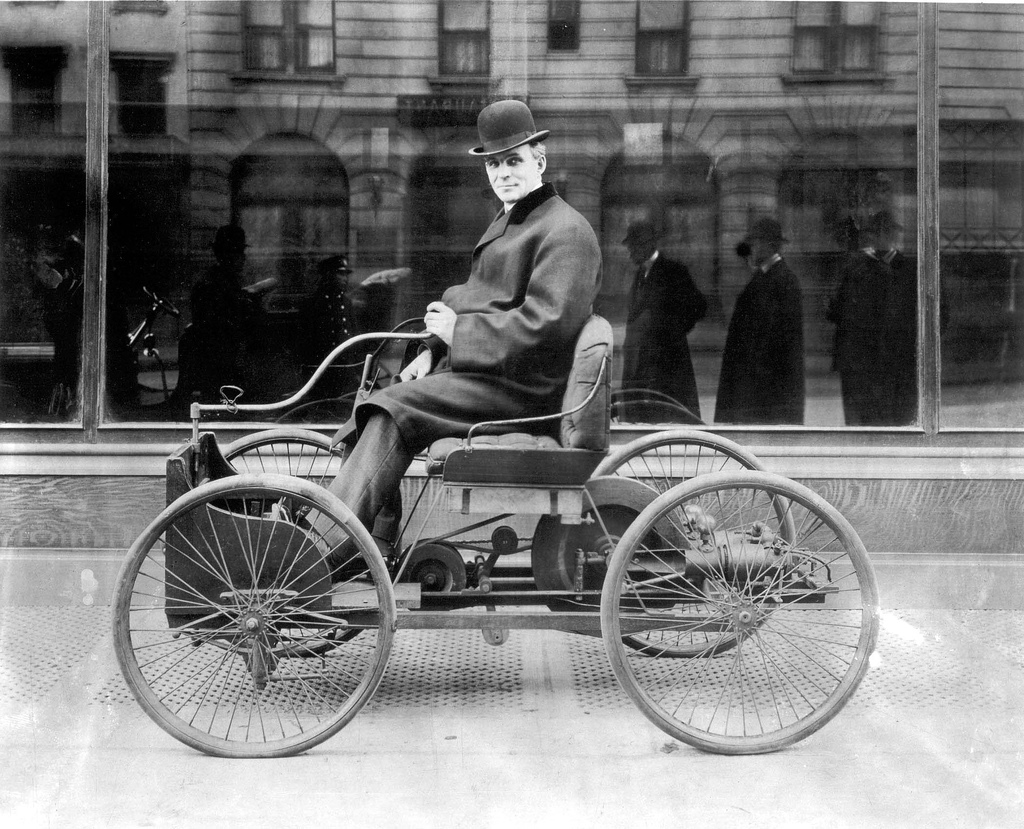
The name quadricycle is derived from Henry Ford’s (1863 – 1947) first vehicle design, the Quadricycle, made from 1896 – 1901. It ran on four bicycle wheels, with a mid-mounted engine using chains to drive the rear wheels. It had a maximum speed of 32 km/h. Various vehicles were handbuilt, until production of the model ceased.
Henry Ford sits in his first automobile, the Ford Quadricycle, in 1896. Photo: Newsweek
LUVLY
LUVLY, the company, was founded in 2015 in Stockholm, Sweden. Unfortunately, I have not been able to find out what they have been doing between then and now. Surely, it doesn’t take eight years to design a quadricycle L7e, even one with innovative design and production features?
The company’s electric vehicle (EV), is the LUVLY 0. It has been designed to be small and light, in two different ways. First, to reduce shipping costs and emissions, by shipping what amounts to a flatpack of 20 vehicles in a single container, ready to assemble in an assembly plant at various locations throughout the world, particularly in Europe. Second, in terms of the assembled vehicle. It is light because it lacks features that others would regard as fundamental. Think fenders or a rear window or a dashboard or air bags or charging technology.
Instead of providing a screen to provide information to drivers, LUVLY relies on the driver coming equipped with a smartphone, to be used with the LUVLY app.
According to press reports, The LUVLY O quadricycle will be launched in 2023, in Stockholm, Paris and Madrid. There aren’t many days left for that to happen! LUV stands for light urban vehicle. It is 2.7 m long, 1.5 m wide, and 1.4 m tall. It has a curb weight of 380 kg. Its 6.4 kWh battery pack, it has a maximum range of 100 km, which is adequate for most commuting, but not much else.
It has a top speed of 90 km/h. Currently, that speed is the maximum allowed on any of the roads we commonly take in Norway. Other places, including a future Trøndelag, when the E6 highway is modernize, allow 110 km/h.
It comes with two portable batteries that weigh 15 kg each, and plug into ordinary wall sockets for charging. They cannot be charged using conventional EV chargers. This may be fine at a workplace or house, but I wonder what happens if one runs low on electricity at a shopping mall?
Quadricycles are not subject to the same safety rules as conventional cars, including EVs. Thus, they are not required to be physically crash tested or to have airbags installed.
Euro NCAP’s first tests in 2014 on heavy (L7e) quadricycles showed major shortcomings in safety. The organisation called for more realistic requirements from the regulators and for quadricycle manufacturers to take more responsibility for the safety of their products. Quadricycles still lack basic safety features found on small cars. Legislators fail to challenge manufacturers to do more and give a false impression to consumers that these vehicles are fit for purpose. They are not.
The LUVLY O has been crash tested using computer simulations. Having studied computer simulation, I admire this approach. Unfortunately, crashing vehicles gives insights that simulations cannot match.
I am intrigued by LUVLY’s unconventional approaches to manufacturing. Flat panels and connectors are used to construct strong, three-dimensional sandwich composite structures resulting in a strong but light chassis.
Currently, LUVLY claims its approach to manufacturing is unique. It may be suitable to have a factory for manufacturing components in one location in the world, and numerous assembly facilities elsewhere, but this approach to production may not be cost effective. LUVLY admits there won’t be a large rollout immediately. I am skeptical that they will be able to transfer this technology to others.
Most vehicles have production runs that number in thousands of vehicles, as a minimum. Exceptions exist. It may be possible to produce limited editions of exotic vehicles, but producing limited editions of an ultra-basic quadricycle in not one of them.
LUVLY will probably never be major manufacturer of vehicles, but may end up as a minor producer. There is a market for niche products. There may be a market for minimalist commuter vehicles and delivery vans. I am not totally convinced that a sports car will be viable.
Vehicles have to be appropriate for the roadways on which they are used, as well as the people using them. At this moment, there is insufficient data to either confirm or deny the safety characteristics of a LUVLY 0. It could well be a suitable city car if used at low speeds, in some environments. It is more difficult to imagine its use in more rural environments, where it could meet large vehicles travelling at high speeds on convoluted roads. While younger drivers have quicker reactions than older drivers with more sluggish movements, I would not encourage anyone (young or old) to drive a LUVLY 0 or any other quadricycle, until adequate safety equipment is in place.
A Mobilize Duo, a quadricycle with three seats and an airbag, made by Renault, and available on a subscription basis.
The most popular EV among the members of my amateur radio group, is a Mitsubishi I-Miev. As a used vehicle it is cheap to buy and to run. More importantly, it has passenger car safety features, even if these are not top of the class. These are used almost exclusively as commuter vehicles. Another choice is the Renault Twizy, which has just stopped production 2023-09. It is a two-seater quadricycle that is equipped with an airbag. Its replacement, the Mobilize Duo quadricycle comes with three seats and an airbag. It can be configured as an L6e vehicle with a top speed of 45 km/h, or an L7e vehicle with a top speed of 80 km/h. This is made by Renault, but is only available on a subscription basis.
Note: Once again, I would like to thank Don Wong for bringing the LUVLY 0 to my attention. Thanks, Don!
Beta ALIA-250 prototype eVTOL aircraft. Photo: Brian Jenkins, 2021-08-23
This weblog post is about Beta Technologies, and especially its partnerships with companies in California and British Columbia.
Beta Technologies is a aerospace manufacturer based in Burlington, Vermont. Since its founding in 2017, it has been developing electric vertical take off and landing (eVTOL) as well as electric conventional take-off and landing (eCTOL) aircraft for the cargo, medical passenger, and military aviation applications. It has also developed a network of chargers which can supply power to aircraft. Training programs for future electric aircraft pilots and maintainers are also provided.
This weblog has covered electric aircraft previously including the ePlane, the Eviation Alice, the eCaravan, Heart Aerospace ES-19 in addition to draft content about other aircraft has been written, but not yet published. I am not surprised that established airplane manufacturers are not at the forefront of electric aviation. This is actually expected according to Clayton Christensen (1952 – 2020). He introduced disruption as an business concept in The Innovator’s Dilemma (1997). Steam shovel manufacturers went bankrupt, while their former market was won over by upstart innovators making hydraulic excavators. Battery based transportation has emerged for land based vehicles, ferries and other ship based transport, as well as aviation.
General Motors may have started the 21st century revitalization of the electric vehicle, with their EV1 in 1996 – 1999, but ended up crushing almost all of the 1 117 EVs produced. An estimated 40 survived, with deactivated powertrains. They claimed the EV was dead.
Tesla Motors was founded 2003-07 by Martin Eberhard and Marc Tarpenning, as a tribute to inventor and electrical engineer Nikola Tesla. In 2004-02, Elon Musk became the company’s largest shareholder with a $6.5 million investment. He became CEO in 2008. Tesla’s announced mission is to create products which help accelerate the world’s transition to sustainable energy. The company began production of its first car model, the Roadster sports car, in 2008.
Tesla Superchargers are a major reason why the brand has become so dominant. A reliable, fast and accessible charging infrastructure has shown itself to be of critical importance in the adoption of EVs. The Tesla charger, known as NACS = North American Charging Standard, developed by Tesla has been used on all North American market Tesla vehicles since 2012 and was opened for use by other manufacturers in 2022.
Beta’s ALIA electric conventional takeoff and landing (eCTOL) aircraft completed a flight milestone of its own in 2023-10, traveling 1 700 nautical miles = 3060 km = from Vermont, across 12 states to Duke Field, a subsidiary of Eglin Air Force Base, in Florida, where the US Air Force is now validating the aircraft for vital use capabilities including critical resupply, cargo deliveries and personnel transport.
The General Aviation Manufacturers Association (GAMA) published a report in 2023-09 titled Interoperability of Electric Charging Infrastructure. This report concluded that shared charging infrastructure offers numerous benefits, in contrast to OEMs developing multiple proprietary protocols.
Beta Technologies has focused on building out an aviation charging network, not only for its own aircraft, but for the entire aviation sector by using an existing standard. Beta has been in developing electric aircraft charging technology since its founding, in anticipation of a new widespread mobility segment. It has 14 charging stations online in the US, with 55 additional sites already in development or under construction.
Archer Aviation’s autonomous, two-seater demonstrator aircraft completed its first hover test on 2021-12-16. Photo: Archer Aviation
Meanwhile, in San Jose, California, Archer Aviation has been developing its own eVTOL aircraft. Archer is a publicly traded company. They have entered into a collaboration, where Archer intends to implement BETA’s electric aircraft charging technology to support its own eVTOL aircraft.
Geography may have been one reason why Beta and Archer found each other. Beta’s charging infrastructure is on the American east coast, while Archer is a west coast entity. Archer will begin by implement two of Beta’s Charge Cube systems at its test facilities in California. It will also deploy multiple Mini Cube mobile chargers. This could become the basis for aviation charging, much as NACS has become the de facto standard for land based EVs.
BETA Technologies’ Charge Cube system. Photo: Business Wire
Archer’s focus is on eVTOL aircraft is to offer an aerial ridesharing service, also referred to as Urban Air Mobility (UAM). They are planned to transport people in and around cities in an air taxi service and are claimed to have a range of up to 160 km at speeds of up to 240 km/h. United Airlines is its first major corporate partner, having ordered two hundred Archer electric aircraft.
Helijet
This Weblog post began because Don Wong sent me a link to an article about Helijet International.
Helijet International is a Richmond, British Columbia based helicopter airline and charter service. Scheduled passenger helicopter services operate flights between heliports at Vancouver International Airport (YVR), downtown Vancouver ( on a floating structure, adjacent to Waterfront Station on Burrard Inlet), downtown Nanaimo at the Cruise Ship Welcome Centre, and downtown Victoria. Helijet also has facilities at Seal Cove (CBF6) in Prince Rupert, and at Sandspit Airport (YZP) and Masset Airport (ZMT) both on Haida Gwai = an island group previously known as the Queen Charlotte Islands.
Helijet Charters serves the film, television, aerial tour, industrial and general charter markets. It is also British Columbia’s largest air medical service provider.
The Helijet fleet currently consists of 3 medevac equipped Aérospatiale AS350 helicopters, 15 Sikorsky S-76 12 passenger helicopters, and a Learjet 31 fixed wing aircraft.
Don’s link said that Helijet would work with Beta to build a five-passenger plus pilot Alia eVTOL aircraft for traveller and commercial transportation, to be used in southwestern B.C. and the Pacific Northwest region. A publicity event to announce this was held on 2023-10-31 at Helijet’s Victoria Harbour Heliport, attended by Skye Carapetyan, sales director of Beta, British Columbia Premier David Eby, and Danny Sitnam, CEO of Helijet.
According to the announcement, the aircraft are currently in advanced flight standards development toward commercial regulatory certification in 2026. These aircraft are quieter, cost less, and are more sustainable for air transportation. However, eVTOL aircraft are not identical with helicopters. This means that the ground and building infrastructure at existing heleports will have to be updated to vertiport standards, which includes integrating zero-emission capabilities, and vertical lift technologies.
The electric aircraft’s vertical take-off and landing ability will also improve emergency response, air ambulance and organ transfer services in the British Columbia, especially the Lower Mainland. It will helping rural/ remote communities gain access to affordable and convenient air services.
Eby commented that the provincial government recognizes the potential of advanced air mobility to decarbonize the aviation sector, improve regional connectivity, improve emergency response times and introduce new manufacturing opportunities.
This post is published on the 120th anniversary of the founding of the Marine Biological Association of San Diego on 1903-09-26. In 1912, the assets of this organization were transferred to the Regents of the University of California and renamed the Scripps Institution for Biological Research. In 1925-10, it was renamed the Scripps Institution of Oceanography.
Its mission statement reads, “To seek, teach, and communicate scientific understanding of the oceans, atmosphere, Earth, and other planets for the benefit of society and the environment.”
One of the more interesting vessels at Scripps was Research Vessel Flip = Floating Instrument Platform. It was in service from 1962-07-23 to 2023-08-04, but is now being scrapped. It is often described as an open ocean research platform designed to study various phenomena such as wave height, acoustic signals, water temperature and density, and to collect meteorological data. The vessel has no means of propulsion, because that could potentially interfere with acoustic instruments. Surprisingly, it is equipped with diesel generators. Flip has to be towed to open water sites where it will be used. Once it is in position it is sunk, reaching a depth of 91.4 m. Part of the vessel remains above the waterline, up to a height of about 17 m above the surface. It can then either be allowed to drift freely, or is anchored in place.
For the past sixty years, I have followed the adventures of Flip at irregular intervals, inspired by its ability to collect data. A cheaper way of collecting data is to use a smaller vessel equipped with sensors. Since 1962 there has been major developments in sensor technology. Sensors are now inexpensive, and can be attached to microprocessors. Data can be stored on equally inexpensive solid state devices, that can be fitted onto an underwater vessel.
In robotics, as elsewhere, language is used inconsistently. There are two types of underwater robots, that is, underwater vessels/ vehicles without human occupants, that use two different naming conventions. If the robot is tethered to the surface it is called a ROV = Remotely Operated Vehicle. If it isn’t, it is called an AUV = Autonomous Underwater Vehicle.
In a more ideal world, it should be possible to distinguish between surface watercraft and submersible watercraft. Both categories could be autonomous or in some way human controlled. Tethered craft are not crewed, but remotely controlled by humans. An alternative naming system could refer to two classes of robotic submersibles, the first referred to as tethered (RS-T), and the second as autonomous (RS-A) or even untethered (RS-U). A vessel crewed with humans could be given the name CS = crewed submersible.
My experience with RS-Ts started in 2008 teaching technology to students at Leksvik Upper Secondary School, and using both the community swimming pool and a local beach as launch sites. Build Your Own Underwater Robot and Other Wet Projects (1997) by Harry Bohm (1954 – ) and Vickie Jensen (1946- ), published by Westcoast Words, in Vancouver, provided the inspiration. A copy of this book was found at the Simon Fraser University bookstore, and purchased in the summer of 1997.
Experimentation with a diving bell, teaches the laws of physics as they apply to submersibles. Depending on the power of the airpump, a diving bell is able to rise, fall and even balance itself in a column of water. However, if the diving bell descends below a certain critical depth, the water pressure will be too great for the air pump to work, and the vessel will continue downward without any ability to stop. This surprises most students.
Three of their models, a Diving Bell (powered by an aquarium airpump), Seaperch (powered by thrusters = electric motors) and Seafox (powered by bilge pumps) were made, adapted and remade, repeatedly.
There are numerous commercial and organizational sites that use the Seaperch and/ or Seafox as the starting point for products, competitions and DIY construction. Unfortunately, some are disingenuous, most notably the Seaperch organization, that fails to acknowledge their indebtedness to Bohn/ Jensen. However, the Wikipedia article about the organization does acknowledge this debt. The Bohm/ Jensen RS-Ts have their limitations, particularly in terms of operational depth. Their main purpose is education, both in terms of construction and operation in a marine environment.
Monitoring Equipment
An infinite number of inmates at Verdal prison had, over the years, requested an opportunity to make drones. In particular, they were interested in using these to monitor prison guards. Fortunately/ unfortunately for the guards/ inmates, respectively, no drones were ever made at the prison, at least not when I was working there. When I did offer to teach them how to make underwater vehicles, there was no interest.
Description of the OpenROV Trident.
Thus, when OpenROV was proposed in 2012, it immediately attracted my attention. It took several years (2015), before OpenROV announced a Kickstarter project to build an underwater drone for everyone. They referred to it as Trident, with a purchase price of $1 200 each.
With a length of 300 mm, a width of 200 mm and a height of 150 mm, it is considerably smaller than either a Seaperch or Seafox. It is also lighter, with a mass of about 2.5 kg. However, it has several additional attributes that distinguish it. The first is an ability to reach a depth of 100 m. This makes it almost useful! The depth exceeds that of RV Flip.
A waterproof tube 180 mm long and 100 mm (outside) diameter houses all the electronics and other environmentally sensitive equipment. There are 3 x 800kv brushless motors to power the RS-T. Two horizontal thrusters allow the RS-T to move forward and aft as well as rotate, and a vertical thruster allows the (neutrally buoyant) vehicle to change depth.
The trident is the weapon of the gods of the Sea: Greek Poseidon, or Roman Neptune as well as Amphitrite, Greek queen of the sea and consort of Poseidon. In Roman mythology she is referred to as Salacia, with a reference to salt. In both sets of myths, Triton, another Greek as well as Roman god of the sea, is the son of Poseidon/ Neptune and Amphitrite/ Salacia. Triton is a merman with a human upper half, and a fish/ lobster/ crayfish lower half. In Hinduism, Shiva also uses a trident, referred to as a trishula.
Ægir (Æge in modern Norwegian) is the Norse god of the sea. He does not appear to have a weapon, but spends his time brewing beer. He is married to Rán (Rån in modern Norwegian), goddess of the sea. Together they have nine daughters, the waves.
One of my intentions when I worked at setting up a mechatronics workshop in Inderøy, was to provide an opportunity for the production of equipment to monitor the environment. At the time I was particularly interested in unmanned underwater vehicles, to discover local sources of pollution. Inderøy library has now taken over this workshop.
Thus, my own little workshop will have to become a local skunk works, producing not only vessels, but slower, lower altitude incarnations of a U-2 Dragon Lady or SR-71 Blackbird, in the form of a drone.
Lockheed took the name Skunk Works from Li’l Abner’s moonshine factory, where it was known as Skonk Works, found in the comics written and drawn by Al Capp (1909–1979), from 1934 to 1977. For those too young to be acquainted with the comic strip, Li’l Abner Yokum, was the son of Pansy Hunks aka Mammy Yokum and Lucifer Ornamental Yokum aka Pappy. They lived in a log cabin in Dogpatch, USA. The location of Dogpatch is disputed, but most place it in Kentucky. One of the wimmenfolk there was the beautiful Daisy Mae Scragg, who married Abner in 1952. Sadie Hawkins was another notorious resident, not quite so beautiful, but intent on marrying. Some of my fascination with names as well as fictitious geography comes from comic strips. In addition to Li’l Abner, Pogo by Walt Kelly (1913-1973) also provided some interesting geographical features in Okefenokee Swamp, located in southern Georgia and northern Florida.
Currently, I have a workshop that supports my construction activities by producing components in wood. While I have not given up the idea of producing wooden products entirely, especially geodesic dome greenhouses, I have also acquired a small computer numeric control (CNC) milling machine, for subtractive processes. One intended use of this machine is to make parts for a RS-T. I also have a 3D-printer for making parts using additive processes.
In the past, I have used the non-descriptive name, Unit One, for this workshop. My own name, Brock, means badger, so it is not inappropriate to rename this workshop the Badger Works, but also incorporating the Norwegian language equivalent, Grevlingverket. From 2024-01-01, I intend to spend time designing and making a RS-T and surface/ support unit, suitable for investigating pollution in Trondheim fjord. The names Ægir and Rán will probably be incorporated into the names of these vessels.
This is a Volkswagen Sportswagen HyMotion vehicle with H2 fuel cell technology. The photo is from 2014, and shows technology developed by Ballard Power Systems of Burnaby, British Columbia. Photo: Volkswagen.
HyMotion is the name Volkswagen applied to its hydrogen fuel cell prototypes. This post is mainly about Volkswagen, a company that was forced to transition to electric vehicles, because of Diesel-gate. The American Environmental Protection Agency (EPA) , had found that Volkswagen had intentionally programmed turbocharged direct injection (TDI) diesel engines to activate their emissions controls only during laboratory emissions testing, which caused the vehicles’ NOx output to meet US standards during regulatory testing. However, the vehicles emitted up to 40 times more NOx in real-world driving.
About the same time, concerns about the danger of global warming led many countries to set up a timeline to phase out fossil fueled vehicles. It is actually a case of too little, too late. The European Union seemed to be heading in this direction, but then on 2023-03-28 it approved legislation ending sales of new carbon-emitting cars by 2035, but made an exception for E-fuel based internal combustion engine (ICE) cars, due to lobbying from Germany. That means ICE cars will continue to be available for sale after 2035, but will need to be fitted or retrofitted with fuelling inducement system technology to prevent the use of fossil fuels. E-fuels are synthetic fuels, regarded by some as carbon neutral because they are produced by capturing CO2, which offsets the emissions from usage. Carbon neutrality is not always the case. In contrast, hydrogen vehicles emit water vapour and warm air, while BEVs have zero tailpipe emissions.
The challenge is that billionaires, and other wealthy people immediately under them in terms of class, want supercar toys, powered by E-fuels. What E-fuel advocates either fail to understand, or more likely are not concerned about, are the dangers of combustion on living creatures, particularly the role of PM 2.5 particulates. In addition, vehicular noise pollution also becomes an issue, as people seek quieter cities, and other places to live.
After the Diesel-gate scandal broke in 2015, Volkswagen saw electrification as a way to redeem itself. New fossil-fueled light vehicles will not be available for sale after 2024-12-31. Many brands, including Hyundai, have already stopped selling ICE vehicles. Volkswagen in Norway will not sell them after 2023-12-31. Already now, almost 90% of light vehicle sales are battery EVs. Hydrogen vehicles are sold, but in insignificant numbers. I am not certain if Norway is following EU regarding E-fuels. However, there will be social pressure exerted on any potential E-fuel users, who will be seen as violators of the Norwegian social contract.
The motivation to write this post, followed an announcement by Volkswagen Group Chief Executive Officer (CEO) Oliver Blume (1968 – ), that the group would transition to hydrogen powered vehicles, after 2030! Previously, 2022-07-03, Blume had supported E-fuels as an effective, complementary solution to making cars cleaner. “Combustion engines can be powered with e-fuels in a virtually carbon-neutral manner. They don’t have to be converted or retrofitted for it. E-fuels can be offered as an admixture or alone at all filling stations. We have to offer an option to the owners of existing vehicles too.” This misses the point that combustion makes a major contribution to debilitating heath issues through the release of PM 2.5 particulates. It also shows his background as CEO of the Porsche division.
In addition, Blume seemed to be more concerned about the economic health of fuel providers. “If produced on an industrial scale, prices of less than $2 per litre could be possible. The important thing is that synthetic fuels are produced sustainably and in places in the world where renewable energy is abundant – then the higher energy input for production is irrelevant. E-fuels produced from water and the carbon dioxide extracted from the air for automobiles, planes and ships have the advantage over pure hydrogen that they can be transported more easily.”
Ballard Power Systems of Burnaby, British Columbia has developed technology for hydrogen fuel cell products, including membrane electrode assembly, plate and stack components. On 2015-02-11 it sold its technology for light vehicles to Volkswagen Group, but retained the rights to this technology for buses and non-automotive uses. Volkswagen introduced its Ballard based technology to the world in the form of four Volkswagen and Audi fuel cell concept vehicles at the Los Angeles auto show in 2014-11.
Since then, Volkswagen has gone on to develop further fuel cell technology. German patent DE 10 2020 119 021 B3 was issued on 2021-07-29 to Volkswagen and Kraftwerk Tubes. It involves a ceramic fuel cell membrane. Allegedly, this is cheaper to manufacture than a polymer membrane, as found on Toyota and Hyundai fuel cell vehicles. It works without any need for an expensive platinum electrocatalyst. Volkswagen states that this will allow them to produce vehicles with a 2 000 km range.
Volkswagen brand’s CEO Thomas Schäfer (1970 – ), said that E-fuels were unnecessary noise, and that hydrogen has some big disadvantages compared to battery technology and that it’s not for Volkswagen, at least not in the next ten years because it is not competitive, especially not for passenger cars, as the fuel tanks take up space in the cabin.
Still earlier, Blume’s predecessor Herbert Diess (1958 – ), criticized H2 fuel cell vehicles, referring to a report from Potsdam Institute for Climate Impact Research (PIK) that concluded hydrogen vehicles are not the way to achieve climate neutrality. Battery electric cars (BEVs) are more sustainable and can be a more environmentally-conscious option for those who are concerned about their car’s emissions.
A move to H2 fuel cells and away from batteries does not seem to be the smartest move, for several reasons. While there are a certain number of early adapters, most of these interested in alternative vehicles have already taken the EV leap/ plunge, finding it a more appropriate solution for themselves than a H2 fuel cell vehicle. This is mainly an operating cost issue, but also a space issue, but increasingly a model availability issue. There are few fuel cell vehicle model choices. EVs have become dominant, with models suitable for a variety of use cases. People are unlikely to reassess their preference for EVs, especially considering that the operating costs of a H2 vehicle are several times higher than that of an EV. Of course, there are others who are brand loyal, irrespective of how stupidly the company they support acts. In Norway, when an EV needs charging, it is typically plugged in at 22:00, when energy prices are lowest. By morning, it is “fully” charged, typically to 80%, to preserve battery life.
A key word is convenience. In much the same way that workers find it more convenient to work at home, and are reluctant to return to the office, most electric vehicle operators find it more convenient to charge at home, and are reluctant to return to a fueling station. Home charging is a habit that grows quickly, especially when commercial high-speed charging is expensive, and offers no to few advantages. H2 is even more expensive.
A previous post discussed the colours of hydrogen, the assorted types of H2 available, based on how it is produced. About 95% of that H2 is methane based, meaning that it is essentially a fossil fuel, that produces CO2. Other types/ colours of H2 are more environmentally friendly, but with the power produced costing about three times more than electrical power from other sources such as wind, solar or hydro. Given a choice, I doubt if consumers would be willing to pay this for this fuel, given the availability of cheaper, more environmentally friendly alternatives (read: BEVs).
In 2023-06, three H2 stations in South Korea received contaminated black hydrogen, produced using steam methane reformation (SMR) — from Korea Gas’ Pyongtaek facility. Proton exchange membrane (PEM) fuel cells used in hydrogen-powered cars need H2 with a purity of 99.9% to safely operate. SMR produces hydrogen (H2), carbon monoxide (CO) and carbon dioxide (CO2). A water-gas shift reaction is usually turns the CO into CO2, while the CO2 is removed using pressure-swing adsorption. In this particular case, some CO or CO2 may not have been properly removed. These impurities can cause irreversible damage, necessitating the replacement of the PEM and other components. For example, CO adsorbs strongly on the platinum electrocatalyst, and CO in hydrogen fuel degrades the performance of the polymer electrolyte fuel cell (PEFC).
On 2019-16-10, an explosion destroyed a Uno-X hydrogen fueling station at Sandvika, near Oslo, Norway. This was covered in one post initially, then followed up in a second post, some two weeks later. More recently on 2023-07-18, hydrogen buses were being fueled at a Golden Empire Transit facility, in Bakersfield, California when one of the buses caught fire. One bus was destroyed and the dispensing portion of the hydrogen fueling station damaged.
In the world there are about 625 public hydrogen fueling stations, according to one source. At the top of the list are: Japan with 175, USA with 107, Germany with 92, China with 88 and France with 40. In Canada there are 8, of which 6 are located in British Columbia (Burnaby, Kelowna, Marpole in Vancouver, North Vancouver (2) and Victoria). There is also one in Mississauga, Ontario and another in Quebec City, Quebec. In Scandinavia, Norway and Denmark have 7 each, Sweden has 5, Iceland has three, while Finland has none. There is actually one located 124 km (1h 51m driving time) south of Cliff Cottage. It is the most northerly in Norway. Except, a Norwegian source states that there are only three H2 fueling stations currently operating in Norway! Interested readers can take it upon themselves to find the correct number of H2 fueling stations in the world. It is probably over 500, but less than 1 000. Currently, one source indicates that there are about 115 000 gas stations in the USA.
Ammonia (NH3) has also been suggested as an energy bearer. This will not be discussed here, except to reference a source for further information.
If Blume is wanting to shift to fuel cells to increase range, he should be aware that researchers at Pohang University of Science & Technology in China have found a way to multiply the energy storage of a battery by ten. An anode stores power when charging and releases it to provide power. Currently, most modern lithium batteries use an anode made of graphite. Other materials, like silicon, have a higher energy capacity, but researchers have been unable to create a stable battery with a silicon anode. This is because the reactions inside the battery cause the silicon to expand dangerously. A research team has created a binding material that will keep a high-capacity silicon anode from expanding.
Currently, the specific energy of a lithium-ion battery is 100–265 Wh/kg (0.360–0.954 MJ/kg). Our Buzz has a 80 kWh battery providing a theoretical 400 km of range. Using the above data, the battery mass should vary from 800 kg to 302 kg. Personally, I see little need for this range to increase by a factor of 10 to 4 000 km. Even the most enthusiastic of users would probably be content with a 2 000 km range. Normal mortals would probably willingly accept 1 000 km,
If the specific energy of a battery increases to 1 to 2.65 kWh/kg (3.6 – 9.54 MJ/kg), then the mass of a battery with a 1 000 km range is probably somewhere between 200 and about 75 kg. A Volkswagen Transporter T6 2.0 TDI has a fuel tank capacity of 80 liters, with fuel consumption per 7.5 liters (combined) per 100 km, or 75 litres for 1 000 km range. The density of diesel is about 0.85 kg/ litre, which means that 75 litres has a mass of almost 64 kg. This does not take into consideration the mass of the storage container. This means that the mass of an EV battery is approaching parity with the mass of diesel.
In 2021, Equinor, Aire Liquide and Eviny started Project Aurora, at Mongstad, Norway. Its goal was to construct a Norwegian liquid hydrogen manufacturing facility for maritime shipping. They estimated that manufacturing costs would likely be ca. US$9.30 per kg. That project was permanently abandoned in 2023-03, because it failed to attract customers. Liquid hydrogen would also be needed for aviation fuels. However, this price is three times the cost of Jet A fuel. Transportation of hydrogen is a major challenge. The US Department of Energy states that a single tanker of gasoline contains 14 times the energy as a tanker of hydrogen. Thus, for both maritime and aviation uses, it may be appropriate to produce H2 near the facilities where it is being used. This situation may also apply to vehicle H2 fueling stations.
It is useful to compare energy pathways. Here, two such pathways will be examined. The first looks at the use of electricity to produce liquid hydrogen, which is used to produce electricity to power, say, an aircraft or ship. Start with 10 MWh of electricty. Turning water into hydrogen is about 70% efficient. There is about 7 MWh of chemical energy in the resulting hydrogen. Compressing, storing, transporting and distribution hydrogen uses another 10%, resulting in 6.3 MWh of available energy. Liquifiction is about 66% efficient, resulting in4.2 MWh of energy. Boil off uses another 5%, leaving about 4 MWh of energy. Burning hydrogen in a jet engine is about 50% efficient at optimum altitude and speed, but is closer to 40% efficient gate to gate. Thus 10 MWh of green electricity provides 1.6 MWh to move an aircraft.
The pathway for a battery aircraft or ship from wind differs significantly. From wind farm to the grid or a battery, it’s about 90% efficient. That results in 9 MWh of energy being available. There is an addition 10% energy loss using electric motors on the aircraft or ship. These would have about 8 MWh of energy available. This is five times the energy available on the hydrogen pathway.
Despite Volkswagen being the automotive brand that I have bought most frequently, I am not a loyal customer. The VW Buzz we currently drive will most likely be our last vehicle purchase. I appreciate having the opportunity to drive a quiet EV, that avoids combustion, and was delivered as a carbon neutral vehicle. I find the comments made by Volkswagen Group CEO Oliver Blume irritating, but not nearly as irritating as some of those made by Tesla CEO Elon Musk.
The final word on this subject will be given to Frank Welsch, Member of the Board of Management of the Volkswagen Passenger Cars brand with responsibility for Technical Development:
"Science is largely in agreement on this issue, as several recent studies have shown. The Federal Ministry for the Environment, for example, assumes that hydrogen and synthetic fuels, so-called e-fuels, will remain more expensive than an electric drive, as more energy is required for their production.The Agora Verkehrswende (traffic transformation) initiative also points out that hydrogen and e-fuels do not offer ecologically sound alternatives without the use of 100 percent renewable energies, and that, given the current and foreseeable electricity mix, the e-car has by far the best energy balance. In the view of the Fraunhofer Institute, synthetic fuels and drive technologies such as hydrogen in combination with the fuel cell will indeed play a role – but not so much in the passenger car sector, but rather in long-distance and heavy-duty traffic, as well as in rail, air and sea transport. These segments will only be converted in later phases of the energy turnaround, i.e. beyond the year 2030, and closely linked to the expansion of renewable energies."
"In fact, hydrogen-based fuel cell technology has one crucial disadvantage: it is very inefficient – both in terms of efficiency and operating costs. This is also confirmed in detail by a Horváth & Partners study, comparing both types of drive for e-cars from the customer’s point of view."
Planet Earth has always undergone transformations, sometimes having enormous effects much more significant than the current warming of the planet. A lot has happened in the 4.6 billion years (about 145 Ps= Petaseconds, in SI units). So, while we will never live on a perfect planet, there is a lot people can do to make it a better planet. Much of that behaviour means doing less. Each of us has a short period of time, perhaps 80 years (2.5 Gs= Gigaseconds), to make a positive impact.
Less
For the past two months (2023-03 and -04), I have taken a sabbatical from writing weblog posts, allegedly to concentrate on a kitchen renovation. The renovation probably did not proceed any faster, but it was delightful to avoid deadline anxiety, which was the real reason for the writing break. Writing was taking up too much of my time. Thus, this post signals that I intend to be more moderate with my writing.
As is the case with most of my posts, much of this one was written months in advance of its intended publication date, sometime in 2024. When this post was originally written, it was for a celebration. Rail journeys to and from Inderøy would stop using Type/ Class 92 diesel powered railcars. Finally, the Trønder line, opened 1882-07-22, would be fully electrified.
Now, Banenor – the Norwegian government-owned corporation that builds out the rail network, claims it is currently working on part of that route from Trondheim to Hell or Stjørdal heading north, and to Storlien, heading east. That section of the line that continues north, between Stjørdal and Steinkjer, where Røra in Inderøy has a station, has been put on indefinite hold. The map, below, provides some clarification about the location of the routes mentioned. Inderøy is unmarked, but it is about 3/4 of the distance along the route from Hell to Steinkjer.
When 2023-05-01 arrived, this post was almost abandoned, because of this unpleasant fact. However, I decided to continue. The original two sentence, opening paragraph appears immediately below, and has not been changed.
One of the major goals Patricia and I share, is to reduce our environmental footprints. Much of this reduction will be associated with transportation.
On our last major rail journeys from Drammen (near Oslo) to Bergen, Patricia was sitting beside a grump, who was pouting because of his lack of internet access, instead of enjoying the scenery. I have promised to change my attitude. I will make notes with a pen on paper on future rail journeys, and use my smartphone to take photos, and will avoid connecting to the internet.
In my defence, journeys always seem too long. My concentration wains after a few hours. Thus, I have obtained a concession that most journeys will be restricted, generally, to an a duration of six hours (a day), but with the possibility of exceptions. This applies not just to trains, but also to other forms of travel.
That rail journey was on an electrified rail line, that obtains its energy from renewable sources. The Class/ Type 92 dielsel railcar sets in use from 1984 to 2022 were noisy rather than uncomfortable, and not really suitable for anyone (apart from athletes) to enter and exit. You can read about them here: https://en.wikipedia.org/wiki/Norske_Tog_Class_92
This simplified map shows the routes from Trondheim that head south (not mentioned further), east and north. Both of these last two routes run to Hell, on the south bank of the Stjørdal River. Across the river to the north is TRD = Trondheim Airport, Værnes and the city of Stjørdal. South of the river the line continues eastward commonly under the name Meråker Line, where it crosses the border into Sweden. The first station in Sweden is at Storlien. West of Storlien, diesel locomotives (Loks, in colloquial Norwegian) were used on this route, with electric locomotives taking over for the journey eastwards.A Type 76 FLIRT train at Trondheim Airport, Værnes station. Photograph: Alasdair McLellan
Stadler, the Swiss train manufacturer, makes various models of FLIRT = Fast Light Intercity and Regional Train (English); Flinker Leichter Intercity- und Regional-Triebzug (German), multiple-unit trainsets. The Type 76, now used in Trøndelag, as a replacement for the Type 92, is a variant of these. It is 7.2 meters longer, with two drive bogies, compared to three on the other similar types, because of a generator car containing four power packs. Each power pack contain a 480 kW diesel engine and a generator that supplies electricity independently of each other. There is also a small battery pack that can be used to move the trainsets in and out of workshop buildings without starting the diesel engines.
I refer to this unit as a Power Pod, essentially a half-length special purpose rail car, equipped with four power packs, each providing 480 kW of diesel fueled motive power to a Type 76 train. The photograph was taken at Røra station, Inderøy by Alasdair McLellan.
To discover new electrified rail adventures, we bought ourselves two books, one in English and the other in Norwegian: The newly (2022-04-12) published 17th edition of Europe by Rail: The Definitive Guide, by Nicky Gardner and Susanne Kries; Ferie med Tog: Reiseglede langs skinnene = Holidays by Train: Travel pleasure along the tracks (2022), by Sigrid Elsrud.
It is not practical to make rail journeys everywhere. For the first time since the pandemic, Brock is taking flights, to Iceland and the Faroe Islands. He and Trish are still intending to take flights to visit our daughter, Shelagh, currently living in Oakland, California. However, these could mark the end of our flying career that began, for Patricia, in 1966, when she returned from Ireland and Great Britain with her sister, Aileen. To get there, they had taken a train across Canada from Vancouver to Montreal, then taken a ship to Cork, in Ireland. Most of our international flights have involved trips to British Columbia, to visit family.
More
If one intends to do less of something, the time involved has to be applied to other activities. Less travel means more of something else. That something else means more of staying at home.
We live in a rural area, and have no intention of moving. We have lived in the same house since 1989-03-01. Most weeks I drive into Straumen, our municipal centre, and back, 26 km (16 miles). Once a month, I extend this to 60 – 70 km (32 – 37 miles) by driving to one of the neighbouring communities of either Verdal or Steinkjer. Patricia has even more extensive driving habits, that may involve driving 100 km in a week. Weather permitting, we make a few longer excursions. In 2022, we spent NOK 10 758.84 on diesel for our Mazda 5, and drove about 8966 km. The fuel costs were about NOK 1.23/ km (US$ 0.20/ mile).
Since 2023-02-13, Buzz, our Volkswagen electrified MPV, has been providing this service. After 80 days of use, we had driven 2004 km, which amounts to an average of slightly over 25 km a day. We had provided Buzz with 526.2 kWh of electricity. This costs us about 1.5 NOK per kWh = NOK 789.30. The fuel costs per km are about NOK 0.40/ km (US$ 0.065/ mile), which is about one third of that of the Mazda 5.
We had driven more with Buzz than I had originally anticipated, but it includes about 700 km of excursions. This would amount to about 9 200 km a year, or almost the same as we drove the Mazda, in 2022.
Reducing transportation impacts may be necessary, but it is not enough to prevent climate change. In many areas we have decided to make do with what we have.
An example: In 2012, we bought a used 40″ HD television for half its 2010 new price (NOK 2 500 vs NOK 5 000). Its TV reception capabilities were almost immediately eliminated to avoid the television reception tax. Instead, it is connected to a media player that, in turn, is connected to our server. The media player uses LibreELEC = Libre Embedded Linux Entertainment Center, a just enough operating system, that supports the Kodi media player software. Both of these are open-source products. This screen will not be replaced until it stops working. It is gudenuf for our use.
This is mentioned because our primary substitute for international travel involves viewing documentary films. We will allow younger, physically fit camera crews to endure the dangers of capturing remote places, and enjoy them in our living room, up to a maximum of one hour a day, and up to several times a week. Five hours of viewing a week, should be enough for anyone. For those who think that we waste our time with television, our total consumption in 2023, ending 2023-05-05 is less than 40 hours! Yes, we keep a complete log of all programs watched.
We often refer to our residence as a cottage, rather than a house. Definitions are often personal, and my definition of a cottage is a residence that is compact, rural, close to nature, simple and charming. One further requirement is that it has to be practical. One cannot live in a cottage without adequate laundry facilities. Wikipedia tells us: “A cottage during England’s feudal period, was the holding by a cottager (known as a cotter or bordar) of a small house with enough garden to feed a family and in return for the cottage, the cottager had to provide some form of service to the manorial lord. However, in time cottage just became the general term for a small house.” The term has its origins in old Norse, kot = hut. The modern Norwegian kott refers to a closet. Related to cot is the Latin domus = dwelling/ house, and grangia = barn. In time the grangia became the grange, referring first to a farm, and then to a large house.
By compact, I mean that rooms are small, yet functional. Rural refers to a low population density. It is more difficult to specify what close to nature actually means, since so much of nature has been destroyed, or cultivated. Sometimes it is simply a brownfield area that has been left to rewild. Simple? One has to be careful about definitions here. Someone might object to calling a dwelling simple, when it is wired with Ethernet cables everywhere, and shelters about 20 different computers. To side-step this issue, I will define simple as the absence of unnecessary decoration. Similarly, I will not even attempt to define charm, except to say one knows it when one sees it.
For better or worse, I am not sure everyone can adapt to cottage life. My parents retired to a new, but similarly sized dwelling on Vancouver Island. They lived there for twelve years, then returned to New Westminster, and lived two blocks from the house where I had grown up. In contrast, I have no desire to reconnect with the bustle of urban life. Online shopping holds greater appeal than in-person shopping, although I value visits to places where I can see and touch wood, as well as plumbing and electrical components!
Before retiring, I would attempt to hire people to renovate parts of the house. It was no great success, because I felt the workers were always trying to take shortcuts or not being competent to do what I asked them to do. Our main bathroom is adequate, but it is not equipped with the pipe-in-pipe plumbing, I requested. The roofer did not know how to apply roofing paper, resulting in a leaking roof. The carpenter did not optimize the use of boards, creating unnecessary waste. Since I retired I have rebuilt much of the cottage myself, but keeping it simple. This year, and for the first time since the cottage was built in 1963, the kitchen is being renovated.
At one point I reflected on my personal dependency on Ikea, especially with respect to my office. It is not always appropriate to make everything. I use an inexpensive, black Ikea Råvaror folding chair (no longer available), with a back and seat made of plywood, without arms. There are no adjustments. This is useful when I make things at my desk. Arms on a chair would just get in the way. When that gets too uncomfortable, I work standing up, folding the chair and stowing it, and raising the sit-stand desk I bought in 2008. It is not from Ikea, but from a local furniture store. It measures 1800 mm wide x 1000 mm deep (72″ x 40″). Along the wall behind my desk I have installed a shelf above the standing height of the desk, and fitted it with three Ikea Moppe mini-storage chests that houses components and tools. Above that I have 4 (width) x 2 (height) Ikea Eket storage cubes, for equipment, books and other reference materials. I also have an Ikea Alex drawer unit, for storage of things, including those printed on paper. More recently, I bought an Ikea Elloven monitor stand with drawer. The top of it supports my 27″ AOC monitor, Logitech G Pro headset and Vertical mouse. Underneath, it provides space to stow my Logitech K860 ergonomic keyboard, while the drawer provides storage space for assorted writing implements. I also have a desk lamp with magnifier, which is sometimes necessary for electronic work. If I need greater magnification, I also have a stereo microscope. I still use my 2016 Asus VivoMini VC65, because I like it. I deliberately bought a monitor without a camera, but have a Logitech webcam, for those few occasions when it is needed. In terms of speakers, I have an Angry Birds speaker bought used for $5. The power supply it did not come with, cost more! It is not used often, because I share my working environment with another person. This is also why I have never considered a mechanical keyboard. In terms of plants, I not only have Phillis, a philodendron, but curtains made from Ikea Filodendron cotton fabric.
While the kitchen has some components from Ikea, especially the Vattudalen sink and Sundsvik tap/ facet. Most of the whiteware is international: The Samsung microwave oven, fridge and freezer were bought in Steinkjer, in 2021; The Electolux dishwasher and oven, and the Husqvarna induction stovetop were bought locally in Straumen, in 2023. I have come to accept a certain level of dependency on large corporations. Much of the remaining components and supplies came from Biltema = Car Theme, in Steinkjer. It is yet another Swedish chain, founded in Linköping in 1963, to provide car parts to the Scandinavian market. In particular, they have provided the material for the cabinets, made from 18 x 600 x 2400 mm = 3/4″ x 2′ x 8′ spruce shelving material, and the 25 x 600 x 2400 = 1″ x 2′ x 8′ oak counter tops. They have also supplied PEX plumbing components, and electrical installation materials. The drawer and sliding door handles have a more complex history. Originally, we bought some at Ikea, but these were discontinued. However, an identical model soon appeared at Biltema. These have become the standard handle used throughout the house. They also provide a sense of continuity. None of these parts are cutting edge, but they are gudenuf!
Some
One of the main reasons I will continue to reduce the time I spend writing is because I want to spend some time doing other things. In 2022-06 I bought a CNC machine that still has not been used. I need to reassign time from writing to working in other areas. I need more variation.
For example, I want to construct a geodesic dome greenhouse, for the experience of making one. Afterwards, I may just give it away because gardening does not give me pleasure, and Trish does not want one. Similarly, I would like to use my CNC machine (and other tools) to construct a robotic lawn mower. Yes, I can probably buy one for less, but that won’t provide me with the satisfaction of making one. It may be based on a Segway Navimow, but with variations.
A Segway Navimow H3000E robotic lawn mower. Photo: Segway
There is now less than five hours before this post will be published. I have made some corrections, eliminated some content, and added some more. I will continue to publish some posts, but not with the same intensity as before.
It was this photo of the interior of a Volkswagen ID. Buzz, that attracted us to the vehicle, especially it light colours (including yellow). In addition, the cabin feels roomy, uncluttered with consoles. The device occupying the space between the driver and passenger can be removed, creating a passage between the front and rear seats of the vehicle. Photo: Volkswagen.
At the start of Putin’s war in the Ukraine (2022-02-24), we reconsidered our general purchasing strategy. We didn’t want our purchases to support companies in countries lacking democratic governments, made with non-union labour or without workers on the boards of directors. Note: I still retain my union membership in Lektorlaget, a teachers’ union. Most of the time, we try to find suitable companies. Suitable is a relative term. Depending on product category, characteristics vary, but with a geographic component. For eggs and milk, geography involves two neighbouring farms. For EVs, computers and hand-held devices, the geographic range has to be extended, to include not just Europe, but also North America (Canada and USA) and a few countries in Asia (notably, South Korea and Taiwan, but also Japan). These conditions exclude Chinese vehicles, and Tesla.
On Friday, 2022-05-20, we received an email from VW about the pricing of their new 5 passenger ID. Buzz. It had a base price of NOK 495 000 = USD 50 000 = CAD 70 000, or about NOK 200 000 less than expected, and almost in our price range. At the time I was not quite sure how to convince Trish that we needed one, because it was at least NOK 100 000 more than our original budget. However, even third place candidate Stellantis, came in NOK 75 000 over the limit. In addition to the advantages shown in the specifications, one practical advantage of the ID. Buzz, is its considerably more space for passengers and for goods. That is because it was designed as an EV from the ground up, which the others were not. In addition, many of the options on the competitors are standard equipment on the ID. Buzz.
Features
There are certain features that I appreciate on assorted EVs. For example, on the Fiat 500, there are Easter eggs = artwork/ design details etched into the vehicle. I found these an attractive addition. It may not quite be personalized, but it is a step away from commodification. On the Hyundai Ioniq 5, there is bidirectional charging capability that allows the car to provide power to a house during a power outage. I think especially of it as useful for keeping food in a refrigerator or freezer at an appropriate temperature. The VW ID. Buzz had this too.
Colours
The colour history of our cars from 1986 to 2012 shows two red cars, followed by two green cars, followed by two light blue cars. For years, I have talked about buying a yellow car. Volkswagen made some vehicles that I admired in Saturn Yellow. My parents owned a 1974 Volvo 144, in Kanaro Yellow. Trish and I rented a yellow Volkswagen Rabbit in Sunbrite Yellow to use on our honeymoon, in 1978. All three colours were close to signal yellow.
Even before May, I had already made the decision, subject to a veto by Trish, that I wanted a yellow car, potentially a special order, painted at the factory. If after-market solutions were needed, then a white vehicle would be purchased that could either be painted, or covered with a yellow wrap.
Decisions
On Saturday, 2022-05-21, I showed Patricia the same photo of the interior of a Volkswagen ID. Buzz, that appears at the top of this post. This attracted her to the vehicle. When asked to explain in more detail what attracted her, it was the brightness of the interior, and especially its use of yellow colour. In addition, she felt the cabin felt roomy, with large windows.
I agreed with all of these points. In addition, I appreciated that the console occupying the space between the driver and passenger was removable, to create a passage between the front and rear seats of the vehicle, or to carry boards 2 400 mm long inside the vehicle!
On Sunday, 2022-05-22, I sent an email to our local Volkswagen dealer saying that we wanted to buy an ID. Buzz. On Monday, 2022-05-23, this was followed up by telephone calls and additional emails. We visited the dealer on Tuesday, 2022-05-24 and attempted to sign a contract, without success because of internet connection issues. Finally on Monday, 2022-05-30, a contract was signed. Our May goal was met.
The agreed price of the Buzz was NOK 572 000 = US$ 57 000, as long as the vehicle arrived in Norway before 2022-12-31. Fortunately for the Norwegian state, the vehicle arrived after that, allowing them to collect almost NOK 42 000 in assorted taxes, for a price just a hair under NOK 614 000. Obviously, people can discuss if this is an acceptable price. People in other places are having to pay considerably more. One worse case situation in Europe is the Netherlands, where consumers would have to pay €81 000 = NOK 850 000 = USD 85 000 for an identical vehicle. (These exchange rates are approximate, but were valid on 2022-05-30.)
When the ID. Buzz was offered for sale in Norway it was available in standard white, pearl effect black, metalic grey, blue, green, orange and yellow, and two-tone variants of the last four, with white on top, and colour beneath. We have chosen the two-tone yellow variant, referred to in our contract as Pomelo Yellow, but also called lemon yellow and lime yellow in assorted publicity materials. This is not a signal yellow, but yellow with a significant green tinge.
According to Volkswagen, ID stands for intelligent design, identity and visionary technologies. All of the various models are EVs, built on the Modularer E-Antriebs-Baukasten = modular electric-drive toolkit = MEB-platform. ID vehicles are powered by an APP 310 permanent magnet brushless electric motor. Motor and gearbox are parallel to the axle. Maximum torque is achieved at low speed, allowing use of a single speed gearbox. The motor and gearbox weigh about 90 kg. The motor is produced in Kassel, with rotor and stator produced in Salzgitter, both located in Germany.
Sandy Munro has torn down, and in other ways evaluated, the Volkswagen ID. 4. Information has been presented in six videos, starting on 2021-04-07. The most interesting one is the wrap up with Alex Guberman, released on 2021-04-19. One important point that was brought out was the need for a planned transition from one vehicle to the next. This resonates with me because I never mastered the transition from a Citroën Evasion to a Mazda 5.
Volkswagen Group’s next transition is to the Scalable Systems Platform (SSP), a modular electric vehicle platform. It was announced 2022-07-15, as part of a new strategy, to use a single battery electric vehicle (BEV) platform across all the group’s brands. Its introduction is planned for 2026. This will be too late for our Buzz, but is probably a sensible approach for Volkswagen to successfully compete with other brands.
lnterestingly, the Buzz has artwork added to the vehicle, much like the Fiat 500. In addition to assorted smilies, and Buzz shapes, there is a drawing of an umbrella found under the rear window wiper blade. There is also V2G charging capability. Our dealer stated that an electric trailer hitch was an essential item, in Norway. We had intended on ordering it anyway.
In contrast to other car dealers that want to maximize optional equipment, I found our local Volkswagen dealer often suggesting restraint. For example, we were also advised against electric rear sliding-door openers, if only because they operate too slowly. Yes, at times, consumers can want too many features.
Challenges
On 2022-06-27, it was announced that there were battery issues with the ID. Buzz at the battery supplier according to Hannoversche Allgemeine Zeitung. Some battery packs contain cell modules that may result in a voltage drop, reducing driving range and – in a worst-case situation – posing a safety risk . These quality-related deficiencies were discovered at the un-named supplier. Around 500 vans were manufactured with the bad cell modules. None were delivered. ID. Buzz production resumed 2022-07-04.
On 2022-07-22, it was announced that Herbert Diess (1958 – ) would stop working as chief executive officer (CEO) of Volkswagen AG on 2022-08-31, to be replaced by Oliver Blume (1968 – ). Severe software-development delays set back the scheduled launch of new Porsche, Audi and Bentley models. Unsuitable software also postponed the debut of some ID models, and some customers are still unable to access over-the-air (OTA) updates.
Volkswagen’s software unit, Cariad, was underperforming. In 2021-12, VW overhauled its management board. Diess had some responsibilities removed, but was given the major task of turning around Cariad. Transforming VW into a leader in electric-vehicle production, requires an emphasis on software solutions. Hardware is not enough. This did not happen. In addition, Diess failed to build alliances within the company, especially with its labour leaders. Thus, he became increasingly isolated.
Delivery
In preparation for delivery of a vehicle we had an Easee Home charger installed on 2023-01-04. It has 3-phase wiring, with 230 V and 32 A, offering the potential to produce up to 11 kW of power. We expect this system to provide most of the vehicle’s energy. This is a Norwegian product, made in Stavanger, by a company owned in large part by immigrants to Norway.
Buzz (as in Lightyear) is the affectionate name of this vehicle. While it should not be treated as a toy, it should not be treated solemnly. Driving and riding in it should be fun, but it should be done safely and with purpose.
On 2023-02-08, we received word that Buzz had arrived at the Volkswagen dealership in Verdal. We agreed with our salesperson, Tormod Olsen, that we would pick up the vehicle on Monday, 2023-02-13. The 13th has significance , especially, in Trish’s life. In chronological order, she was born on 12-13, her nephew was born 11-13 and we married on 01-13.
The Future
There are certain items that I have no intention on selling. Cliff Cottage, our residence since 1989-03-01 is one, as is much of its inventory. I expect Cliff Cottage to be used as a holiday residence, a place where my descendants, friends and family will be able to relax and enjoy a form of solitude close to nature. Buzz is another. I expect that he will be able to meet the land transportation needs of people when they come to stay at Cliff Cottage.
As noted in a previous weblog post, within a decade, 2033, solid-state batteries are expected to mature, offering over a million kilometers of transportation service. I envision Buzz lasting a century. He has been bought with that intention. The next milestone on his path to venerability will be on 2053-02-13, when he turns thirty. At that moment, he becomes a Norwegian veteran car. I will not be present for that event. Our son, Alasdair, will be quickly approaching seventy, while Shelagh, our daughter, will, at sixty three years and ten months, soon be reaching the upper limits of what could be referred to as middle age.
An 2022 Opel Combo Life multi-purpose vehicle (MPV) one of four families of electric vehicles (EV) that we considered buying.
2022-05-01: Our challenge, during May, was to find a replacement vehicle for our diesel powered Mazda 5, turning ten on 2022-10-19. In Norway, over 80% of all vehicles sold are battery electric vehicles (EVs), while another 10% are hybrids. Those still driving ICE vehicles, realize that they are fossils. They may refer to the vehicles, the drivers or both. Readers are free to select their own variant, but I have elected both, if only because choosing an EV requires a mindset open to change. Such a mindset is helped by volatile diesel and gasoline fuel prices, with some consumers complaining they have paid NOK 30 per litre (US$ 12 per gallon). Prices bounce. On Monday 2023-02-13, the price was slightly over NOK 18 in the morning, but over NOK 25 in the afternoon. Rather than increasing the wealth of oil investors, I would prefer to pay a premium for a vehicle that uses renewable energy. EVs are sweetened with financial and other incentives provided, in our case, by the Norwegian government.
Yet, there is a certain amount of time pressure in finding something suitable. Government incentives are being reduced. Currently, Norwegian EV purchases are exempt from value added tax (VAT). Effective 2023-01-01, VAT will apply on that part of an EV expenditure that exceeds NOK 500 000. The government claims that there are vehicles available that cost less than this. There will also be a weight tax, NOK 12.50 per kilogram gross-vehicle weight that exceeds 500 kg. In addition, EVs have their official weight reduced (for tax purposes) by the weight of the battery, which can be up to several hundred kilos.
Many Norwegians feel they need to buy more expensive and heavier vehicles. Narrow, curvaceous, steep mountainous roads demand good handling, power, energy and braking capacity, preferably with generous amounts of safety equipment onboard, should an unfortunate event occur. Utility trailers, the ubiquitous Norwegian replacement for a pickup, also require power and energy. Ideally, the vehicle is under five meters in length and two meters in width, with a low centre of gravity. Range is another desirable attribute, not so much for the daily commute, but for the weekend, when Norwegians travel to areas of natural beauty and low population density, that typically lack built-out charging facilities. These features add to the price of an EV.
Segments
Throughout the world there are different ways to categorize vehicles. Wikipedia has an article about car classification that attempts to explain these, and to compare and contrast the various systems in use. In Europe, vehicles are classified into segments, most often by size, from A (mini = city) to D (large = American mid-size). E, F and S are used for executive = American full-size, luxury and sports vehicles, respectively. In addition, J-segment (sports-utility) vehicles were originally vehicles equipped with four-wheel drive. Now, this requirement seems to have been dropped. Vehicles in this segment offer elements of on-road passenger cars with some off-road features, most notably raised ground clearance and higher seating, the H5 measurement. The segment is currently dominated by crossovers, with a more luxurious interior, but with a conventional exterior appearance. M-segment (multi-purpose) vehicles are often described as van-based passenger cars, but include other taller vehicles as well. Both the J- and M-segments are further divided into small and large groups.
The American Environmental Protection Agency (EPA) classifies many passenger cars on the basis of a vehicle’s total interior passenger and cargo volumes. An exception involves SUVs, that are classified as light-duty trucks, resulting in more lenient regulations compared to other passenger cars. Light-duty trucks are classified based upon their gross vehicle weight rating (GVWR). Heavy-duty vehicles are not included within the EPA scheme. In contrast, the United States National Highway Traffic Safety Administration (NHTSA) separates vehicles into classes by the curb weight of the vehicle with standard equipment including the maximum capacity of fuel, oil, coolant, and air conditioning.
Increasingly, there are challenges with these segment designations, especially their conflation of comfort level and size, as well as the exemption of SUVs and pickups from environmental standards. Personally, I have never understood the appeal of a limousine, with an excessively long yet low body style. They do not even make particularly good lowriders! The Hyundai Staria is a much better luxury vehicle, combining a van exterior with a more luxurious interior, a cruise ship lounge inspired interior that uses hanok, a traditional Korean architectural style, to provides a sense of spaciousness and to connect the outside to the inside.
To put things into perspective, the vehicles we have owned in Norway fit into the following segments: Subaru Justy (B), Volkswagen Golf (C), Citroën Berlingo (M-small), Citroën Evasion (M-large), Hyundai Matrix (M-small), Mazda 5 (M-small). Two-thirds of all vehicle purchases, and all in the new millennium, were M segment vehicles. All of these vehicles were front-wheel drive, although the Justy also could use 4 wheel-drive, when needed.
The J segment is the category that sells the most vehicles in Europe. Regardless, Patricia and I seem to be dedicated M-segment people. In addition, after 36 years of driving front-wheel drive vehicles, we prefer them, when given a choice between front- and rear-wheel drive. We have no need for four-wheel drive, as we can now just avoid driving when whether conditions are at their worst. It is difficult to believe that since our marriage in 1978, at least some of our preferences have merged.
Within the M-small segment four families of vehicles had been investigated, on paper. Unfortunately, they were not available to drive, or even look at, so – initially – no conclusions could be reached. These vehicles could all carry five passengers and lots of goods.
On Tuesday, 2022-04-03, we attempted to see some Stellantis M-segment vehicles in Verdal. In this segment, Stellantis produces: Citroën Berlingo Multispace, Opel Combo Life, Peugeot Rifter and Toyota Proace Verso. We visited both a Peugeot dealer – who theoretically also sells Citroën products – and an Opel dealer. They could only show us cargo vans. Despite this, after a few days we received an offer on an Opel Combo Life, at NOK 445 000, but this was missing the colour option we wanted – a yellow vehicle. That would cost at least another NOK 30 000, bring the cost to about NOK 475 000.
On Thursday, 2022-05-05, we sent an email to our preferred Hyundai dealer, asking when an electric passenger version of the Hyundai Staria van was going to be made in Europe, and available for sale in Norway. The reply was that it would not be available until at least 2024, putting it outside of our timeframe.
A Hyundai Staria, currently unavailable as an EV in Norway, but expected in 2024 or 2025.
We also contacted appropriate dealers about Mercedes-Benz EQT, Nissan Townstar and Renault Kangoo EVs. All of these would be made by Renault. We were told by multiple dealers that they would arrive in Norway, about 2022-11. Checking websites on 2023-02-01, they are not available. These were designed simultaneously as both as an ICE vehicles and EVs. They entered production in 2021 as an ICE variant. While these vehicles three years more modern than the Stellantis models, they are still designed with multiple sources of power in mind, making them less desirable than a product that is EV only. We were told that the Nissan Townstar EV would have a price starting of about NOK 370 000. With a little optional equipment, these will cost about the same as their Stellantis equivalent. The gasoline version has a starting price just under NOK 500 000.
Media reports indicated that the Volkswagen ID. Buzz was expected to be available in Norway by the end of May. On 2018-02-05, I had publicly sworn not to buy another Volkswagen product, because of Dieselgate. Despite that, I contacted my local Volkswagen dealer, and discovered that NOK 700 000 was the salesman’s best guess at a base price, perhaps more. Totally out of our price range.
Here is a comparison of the specifications for these three available product families in alphabetical order: Renault, Stellantis and Volkswagen. The best value is in bold. Power = 90/ 100/ 150 kW; torque = 245 / 260/ 310 Nm; battery (gross) = 45/ 50/ 82 kWh; range WLTP mixed = 300/ 280/ 418 km. Dimensions = length x width (excluding mirrors) x height = 4486 x 1919 x 1893/ 4403 x 1848 x 1878/ 4712 x 1985 x 1937 mm; wheelbase = 2785/ 2716/ 2988 mm; ground clearance = 180/ 164/ 143 mm; trunk capacity = 775/ 597/ 1121 litres; trailering capacity = 1 500/ 750/ 1 000 kg. Renault excels in terms of ground clearance and trailering capacity, but Volkswagen exceeds at everything else.
A 2023 Renault Kangoo E-tech MPV
On 2012-10-19 we purchased a Mazda 5 that cost NOK 275 000, which involved an almost NOK 50 000 discount, as the model was being discontinued. Before we first started looking at vehicles in 2022, we set the maximum price at about NOK 400 000. The only vehicle we found within this price category, that we liked, was the Renault Zöe. We drove one and concluded that it had acceptable characteristics including various types of driver assistance, power and range. With these options, its price was NOK 310 000. However, its small size would require that an additional larger vehicle be available for some purposes, effectively meaning that we would be unable to dispose of the Mazda 5. This was not an ideal solution.
Stellantis multi-purpose vehicles (MPVs) = Citroën e-Berlingo/ Opel or Vauxhall e-Combo Life/ Peugeot Rifter were designed as ICE vehicles in 2018. They were updated to include EV versions in 2021. Unfortunately, equipment has not been significantly updated for the 2020s. For example, only halogen headlights are available. No LEDs, and not even Xenon lights, are offered. With far too many long, dark nights, Scandinavians are willing to invest in vehicle lighting. One of the reasons we bought our Mazda 5 was that it came equipped with Xenon lights.
Electrek estimates the current price of a battery pack for an EV at US$ 132/ kWh (or about NOK 1 300) down from US$ 1 200 in 2012. One of the main challenges with a Stellantis MPV is its limited battery size, 50 kWh, in contrast to a VW ID. Buzz with 83 kWh (gross)/ 77 kWh (usable). Thus, the 30 kWh extra capacity is worth about NOK 40 000.
The ID. Buzz is also equipped with vehicle to house (V2H) bidirectional capability. This means that it can power electrical appliances and tools in off grid settings. During a power outage, the vehicle can be used as a power source to keep the electrical system in a house running. Since, our house may soon be equipped with an additional storage battery of 30 – 100 kWh capacity, the Buzz will be able to drive to a public fast charger to bring more electrons back! It may surprise some readers, but we experience electrical power outages about once a month. Sometimes they last only a few seconds, and most are under an hour in duration. It is still an inconvenience. Currently, many houses use wood stoves to provide warmth during longer outages, but these are ineffective at cooking meals, and useless at keeping food cool/ frozen or providing lighting. The V2H capability has been written about in a previous weblog post. It is assessed a nominal value of NOK 20 000.
Vehicle autonomy is often categorized in six levels. These are often coded as: Level 0 – no automation; Level 1 – hands on/shared control; Level 2 – hands off; Level 3 – eyes off; Level 4 – mind off, and Level 5 – steering wheel optional. Volkswagen claims that ID. Buzz will in the future be able to operate at level 4. In 2022-04, it started testing of an autonomous ID. Buzz AD prototype with Argo AI on public roads. The vehicle already comes equipped with some level 3 capabilities, such as autonomous parking. This is an important, especially for older drivers. The current autonomous driving capability is assessed a nominal value of NOK 20 000.
One issue with the Stellantis MPV is its use of halogen lighting. LED headlight use less electrical energy and run cooler. They produce a whiter and brighter light of 3 000 to 4 000 lumens, in contrast to the yellow of halogen bulbs at 1 000 to 1 500 lumens. LED headlights cast a larger and brighter light pattern on the roadway, so it improves driver situation awareness, while halogens cast a smaller, yellowish light pattern. Unfortunately, many oncoming vehicle drivers suspect that a LED outfitted vehicle is using its high beams, when they are not. LED lights are more durable, but more expensive and complicated to repair/ replace. LED lights are small and provide vehicle designers with a greater opportunity for design creativity. In Norway, retrofitting halogen with approved LED headlights costs a minimum of NOK 20 000. This is the value that will be assigned to LED lighting.
Not everyone in the automotive press is enthusiastic about the driveline on the ID. Buzz. With 150 kW of power, and 310 Nm of torque, its top speed is limited to 145 km/h, with an official acceleration from 0 – 100 km/h of 10.2 s. If this is too little, one wonders how they would react to 100 kW of power and 260 Nm of torque with the Stellantis MPV. Its top speed is 130 km/h, with an official acceleration from 0 – 100 km/h of 11.7 s. I do not expect to drive over 120 km/h, so the additional top speed is not particularly useful. Locally, the speed limit is 90 km/h, although the new highway to Trondheim is expected to have a speed limit of 110 km/h. There are some test sections with limits of 120 km/h, which is the maximum speed in Sweden and Finland. Denmark has motorways allowing 130 km/h.
Some of the extra power in the Buzz will compensate for the extra mass of the vehicle. On the other hand, the Stellantis MPV is fitted with front-wheel drive. Perhaps this is the only feature that I appreciate more on the Stellantis MPV than on the VW ID. Buzz. Rear wheel drive could be regarded as an acceptable price to pay for owning an iconic vehicle. It is difficult to find out what additional power and torque in a driveline actually costs, but- after deducting the value of front-wheel drive – will once again will use NOK 20 000 as its nominal value.
This total of NOK 120 000 more than accounts for its increased value of the Volkswagen ID. Buzz, in relation to a Stellantis MPV. In addition, the larger space for passengers and goods, and its iconic aesthetics, have not even been taken into consideration, in terms of assessing its economic value.
For the past twenty years, I have admired Volkswagen’s minivan concept vehicles. It began in 2001 with the Microbus concept, presented at the North American International Auto Show, in Detroit. Unfortunately, despite an attractive design, it was environmentally unfriendly, using a 3.2L V-6 engine of 172 kW and 320 Nm. Production was scheduled for 2003, until it was deferred and then cancelled in 2005.
2001 Volkswagen Microbus Concept
In 2011, a smaller Bulli concept was presented at the Geneva Motorshow. It was electrically powered with a 85 kW motor producing 270 Nm of torque using a 40 kWh battery giving a 299 km range. One significant difference, compared to the 2001 concept, was the use of conventional back doors, rather than sliding doors.
On 2015-09-20, Volkswagen announced that it had deceived the public about the emissions from eleven million diesel vehicles, using a software detect device that engaged full emission control only when the vehicle was being tested. On 2015-10-12 Volkswagen announced that it would accelerate electric vehicle development.
On 2016-01-05, Volkswagen presented the Budd-e at the Consumer Electronics Show, in Los Vegas. It was built on a MEB platform, with two motors producing 225 kW of power. The 101 kWh battery had an estimated range of 375 km.
This was followed up on 2017-01-08 at the North American International Auto Show in Detroit, with the ID. Buzz, described as a versatile, zero-emissions, all-wheel drive vehicle for the future. All-electric driving range of up to 435 km, with 275 kW of power from two motors, seating for up to eight with two luggage compartments, ID. Pilot, automated driving mode, while the driver’s seat can be turned 180 degrees to face the rear, head-up display projected information, and fully autonomous driving capability.
The production model of the ID. Buzz is very similar in appearance to the concept vehicle, but currently lacks many of the proposed features. The initial model released in Europe is also shorter. In many publications directed towards people working in the automotive industry, the ID. Buzz is referred to as a Lower Premium vehicle. This seems to indicate that some initial steps are being taken to separate vehicle specifications, and passenger comfort features in particular, from vehicle shape.